Понятие 1/f-шума и методы его устранения
В данной статье дается определение 1/f-шума (фликкер-шума) и рассматриваются способы его уменьшения или устранения в прецизионных измерительных схемах.
В данной статье дается определение 1/f-шума (фликкер-шума) и рассматриваются способы его уменьшения или устранения в прецизионных измерительных схемах. 1/f-шум не может быть удален с помощью обычной фильтрации, но его можно ограничить, чтобы достичь лучшей производительности в прецизионных измерительных схемах и обеспечить высокую точность измерений.
Что такое 1/f-шум (фликкер-шум)?
Фликкер-шум или 1/f-шум – это низкочастотный шум, плотность которого обратно пропорциональна частоте. 1/f-шум присутствует не только в электронике, но и в музыке, биологии и даже экономике [1]. В настоящее время продолжается обсуждение, и проводятся многочисленные исследования источников происхождения фликкер-шума [2].
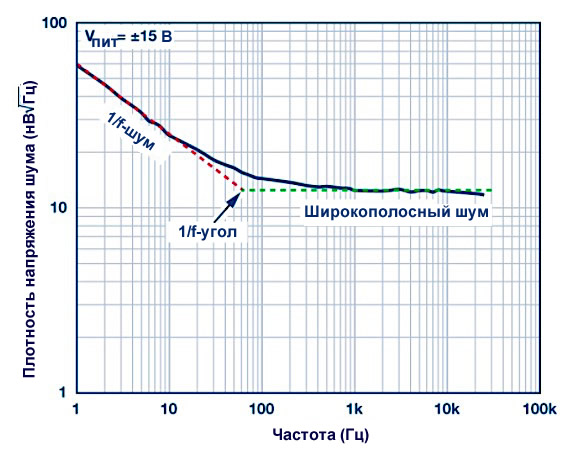
На рисунке 1 представлен график спектральной плотности напряжения шума операционного усилителя ADA4622-2, на нем можно выделить две характерные области. Левая часть графика – область 1/f-шума, а в правой части графика преобладает широкополосный шум. Точка пересечения между областями 1/f-шума и широкополосного шума называется 1/f-углом.
Как выполняется измерение и определение 1/f-шума?
После сравнения графиков плотности шума ряда различных операционных усилителей становится очевидным, что 1/f-угол (частота излома шумовой характеристики) зависит от модели конкретного ОУ. Чтобы было проще сравнивать компоненты, измерения шума различных компонентов необходимо выполнять в одном диапазоне частот. Для напряжения низкочастотного шума стандартным параметром является размах шума в полосе от 0,1 Гц до 10 Гц. Для операционных усилителей шум в полосе от 0,1 Гц до 10 Гц может быть измерен с помощью схемы, показанной на рисунке 2.
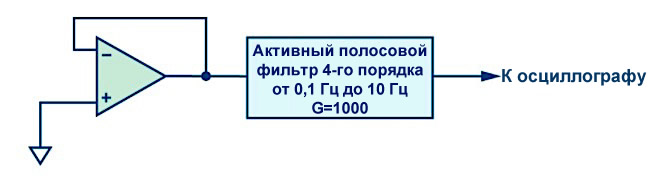
В данной схеме операционный усилитель работает с коэффициентом усиления 1 и с соединенным с землей неинвертирующим входом. Для питания ОУ используется два источника, что позволяет обеспечивать на входе и выходе нулевое напряжение.
Активный фильтр ограничивает ширину полосы частот, где необходимо измерить шум, и одновременно обеспечивает коэффициент усиления 1000 для шума операционного усилителя. Это гарантирует, что шум от тестируемого устройства становится основным источником выходного шума в схеме. Смещение напряжения операционного усилителя не имеет значения, так как на входе фильтра выполнена развязка по постоянному току.
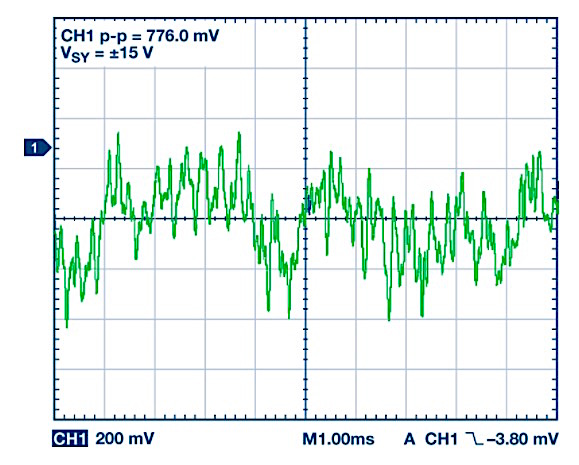
Выход фильтра подключен к осциллографу. Пиковые значения напряжения измеряются в течение 10 секунд, чтобы обеспечить охват всего частотного диапазона от 0,1 Гц до 10 Гц (1/10 секунды = 0,1 Гц). Далее, чтобы рассчитать шум в полосе от 0,1 Гц до 10 Гц, результаты, полученные на осциллограмме, делятся на величину коэффициента усиления 1000. На рисунке 3 представлена осциллограмма шума операционного усилителя ADA4622-2 в полосе от 0,1 Гц до 10 Гц. ADA4622-2 имеет очень низкий уровень шума в диапазоне от 0,1 Гц до 10 Гц, всего 0,75 мкВp-p (пик-пик).
Какое влияние 1/f-шум оказывает на схему?
Полный шум системы складывается из шумов всех ее компонентов. Пассивные компоненты являются источниками 1/f-шума, ток шума также имеет составляющую 1/f-шума. Однако для низких сопротивлений 1/f-шум и токовый шум обычно слишком малы, и ими можно пренебречь. Далее в данной статье будет рассматриваться только шум напряжения.
Чтобы рассчитать общий шум схемы, необходимо рассчитать 1/f-шум и широкополосный шум, а затем сложить их. Если мы используем спецификацию шума в полосе от 0,1 Гц до 10 Гц из технического описания, то мы предполагаем, что 1/f-угол (частота излома шумовой характеристики) находится ниже 10 Гц. Если же частота излома шумовой характеристики находится выше 10 Гц, то для расчета 1/f-шума необходимо использовать следующую формулу [3]:
\[\frac{1}{f}Шум_{rms} = e_{n1Гц} \left( \sqrt{\ln\left( \frac{f_h}{f_l} \right)} \right)\]
где:
- en1Гц – плотность шума на частоте 1 Гц;
- fh – частота излома шумовой характеристики (1/f-угол);
- fl – 1 / время апертуры (т.е. длительность измерения).
Например, если мы хотим оценить 1/f-шум ADA4622-2, значение fh составляет около 60 Гц. Задаем fl равным 1/время апертуры. Время апертуры – это общее время измерения. Если мы установили время апертуры (время измерения) 10 секунд, то fl составляет 0,1 Гц. Плотность шума при 1 Гц (en1Гц) составляет приблизительно 55 нВ/√Гц. Всё это дает в результате 139 нВrms в диапазоне от 0,1 Гц до 60 Гц. Чтобы перейти к пиковым значениям, необходимо умножить полученный результат на 6,6, что даст приблизительно 0,92 мкВp-p (размах от пика до пика) [4]. Это примерно на 23% выше, чем значение, указанное в документации для диапазона от 0,1 Гц до 10 Гц.
Широкополосный шум можно рассчитать по следующей формуле:
\[Шум_{rms} = e_n \sqrt{NEBW}\]
где:
- en – плотность шума при 1 кГц;
- NEBW – эквивалентная шумовая полоса частот.
Поскольку спад амплитудно-частотной характеристики фильтра происходит плавно, то для учета дополнительного шума за пределами частоты среза фильтра используется эквивалентная шумовая полоса частот. Эквивалентная шумовая полоса частот зависит от количества полюсов и типа фильтра. Для простого однополюсного фильтра нижних частот Баттерворта NEBW составляет 1,57 × частота среза.
Для ADA4622-2 широкополосный шум составляет всего 12 нВ/√Гц при частоте 1 кГц (среднеквадратичное значение). Используя простой RC-фильтр с частотой среза 1 кГц и применив предыдущую формулу, получим среднеквадратичное значение широкополосного шума, примерно равное 475,5 нВrms:
\[ШП\ Шум_{rms} = 12нВ \sqrt{1 кГц \times 1,57}\]
Обратите внимание, что простой RC-фильтр нижних частот имеет такую же передаточную функцию, что и однополюсный фильтр нижних частот Баттерворта.
Чтобы рассчитать полный шум схемы, необходимо сложить 1/f-шум и широкополосный шум. Поскольку источники шума не коррелированы, то для сложения используется метод квадратного корня из суммы квадратов (RSS):
\[Полный\ Шум_{rms} = \sqrt{ \left( \frac{1}{f} Шум_{rms} \right)^2 + \left(ШП\ Шум_{rms} \right)^2 }\]
Используя эту формулу, можно рассчитать среднеквадратичное значение полного шума ADA4622-2 с выходным RC-фильтром нижних частот с частотой среза 1 кГц. В результате получаем значение 495,4 нВrms. Это лишь на 4% больше, чем уровень одного только широкополосного шума. Из этого примера видно, что 1/f-шум имеет существенное значение только для измерительных схем, работающих с постоянными или очень низкочастотными сигналами. Если же целевой частотный диапазон измерительной схемы в десять или более раз превышает частоту 1/f-угла (частоту излома шумовой характеристики), влияние 1/f-шума оказывается незначительным, и о нем можно не беспокоиться.
Поскольку полный шум определяется как корень из суммы квадратов отдельных шумовых составляющих, то при расчетах можно пренебречь источником меньшего шума, если его уровень составляет менее чем 1/5 от уровня шума основного источника. Дело в том, что вклад 1/5 уровня шума в общий шум схемы составит всего 1% [5].
Как мы можем устранить или уменьшить 1/f-шум?
Стабилизация прерыванием (chopper stabilization, chopping) – это один из методов уменьшения напряжения смещения усилителя. Однако, поскольку 1/f-шум – это низкочастотный шум, близкий к постоянному напряжению, этот метод также помогает эффективно бороться и с ним. В усилителях со стабилизацией прерыванием (чопперные усилители) входной сигнал коммутируется с определенной частотой, а на выходе происходит его обратное восстановление. Работа схемы эквивалентна процессам модуляции и демодуляции.
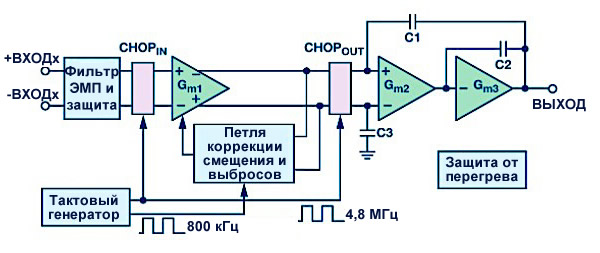
На структурной схеме ADA4522 (рисунок 4) видно, что модуляция входного сигнала частотой прерывани (chopping frequency) производится в блоке CHOPIN. Блок CHOPOUT выполняет синхронную демодуляцию сигнала с возвращением к его исходной частоте и одновременно выполняет модуляцию входного напряжения смещения и 1/f-шума входного каскада ОУ частотой прерываний. Кроме снижения напряжения смещения, в чопперных усилителях уменьшается зависимость напряжения смещения от синфазного напряжения, что позволяет достигать очень высокой линейности по постоянному напряжению и высокого коэффициента подавления синфазного сигнала (CMRR, common-mode rejection ratio). Стабилизация прерыванием также уменьшает зависимость напряжения смещения от температуры. По этой причине чопперные усилители часто называют усилителями с нулевым дрейфом. Важно отметить, что усилители с нулевым дрейфом устраняют только 1/f-шум усилителя. Фликкер-шум от любых других источников, таких как датчики, будет проходить через усилитель без изменений.
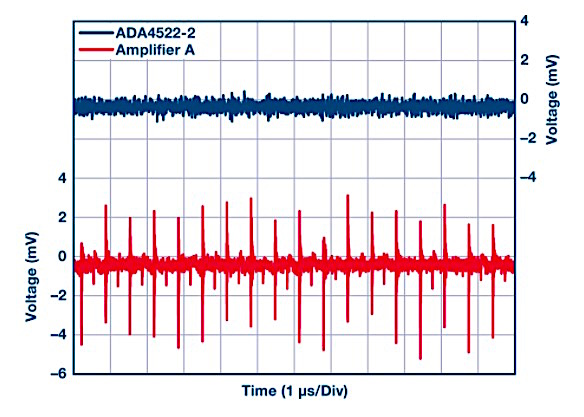
Расплатой за использование модуляции становится появление коммутационных помех на выходе и увеличение входного тока смещения. Пульсации на выходе усилителя можно наблюдать с помощью осциллографа, а пики шума на спектральной плотности шума можно увидеть с помощью анализатора спектра. Новейшие усилители с нулевым дрейфом от Analog Devices, например, представители семейства ADA4522 с напряжением питания до 55 В, используют запатентованную схему обратной связи, позволяющую эффективно бороться со смещением и пульсациями для минимизации коммутационных артефактов [6].
Стабилизация прерыванием может также применяться в инструментальных усилителях и АЦП. В частности, данный метод используется для борьбы с температурным дрейфом и 1/f-шумом в таких компонентах, как инструментальный rail-to-rail усилитель AD8237, малошумящий и малопотребляющий 24-битный Σ-Δ АЦП AD7124-4, новый 32-битный Σ-Δ АЦП AD7177-2 со сверхнизким уровнем шума.
В классической схеме стабилизации прерыванием модуляция входного сигнала производится с помощью прямоугольного модулирующего сигнала. Одним из недостатков модуляции с помощью прямоугольного сигнала является то, что прямоугольные сигналы содержат много гармоник. Шум на частоте каждой гармоники при демодуляции будет возвращен на постоянную составляющую. Использование модуляции синусоидальным сигналом позволяет сделать усилитель менее восприимчивым к шуму и позволяет работать с малыми входными напряжениями при наличии значительных шумов или помех. Этот подход используется в синхронных усилителях (lock-in amplifiers) [7].
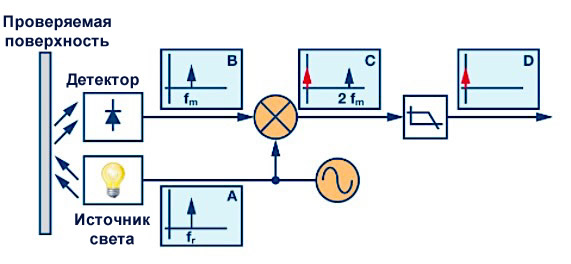
На рисунке 6 представлен пример, где выходной сигнал датчика модулируется синусоидальным сигналом, который используется для модуляции источника света. Свет, отражаясь от поверхности, фиксируется фотоприемником. Далее выходной сигнал фотодетектора нормируется, после чего происходит его демодуляция. При этом для модуляции и демодуляции используется один и тот же синусоидальный сигнал. После демодуляции выходной сигнал датчика возвращается в низкочастотную область. Демодуляция может быть выполнена либо аналоговым способом, либо методами цифровой обработки сигналов после аналого-цифрового преобразования. Очень узкий фильтр нижних частот, например, с частотой среза 0,01 Гц, необходим для подавления всех более высокочастотных шумов. В результате у нас остается только исходный выходной сигнал датчика с чрезвычайно низким уровнем шума. Для получения минимальной погрешности измерения огромное значение имеет точность синусоиды. Стоит еще раз подчеркнуть, что предложенный метод устраняет 1/f-шум измерительной схемы, но не устраняет 1/f-шума датчика.
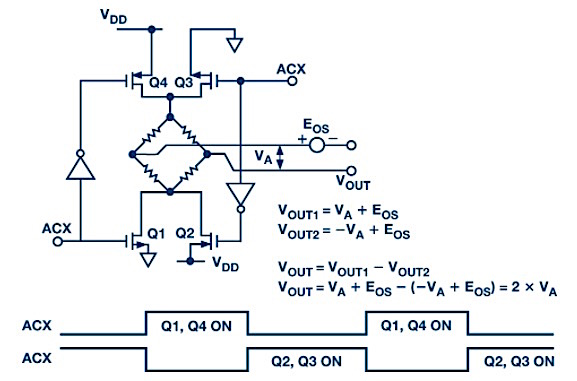
Если для датчика требуется сигнал возбуждения, то 1/f-шум датчика можно устранить с помощью возбуждения переменным напряжением. Данный метод заключается в использовании прямоугольного сигнала возбуждения датчика для получения прямоугольного выходного сигнала, а затем удаления модулирующего сигнала на выходе. Такой подход не только позволяет устранить 1/f-шум от датчика, но и удалить дрейф смещения и другие нежелательные температурные зависимости [8].
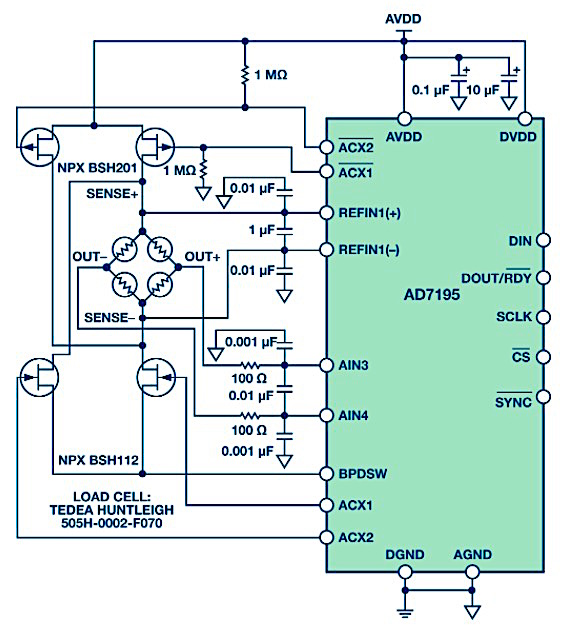
Переменное возбуждение можно организовать с помощью дискретных ключей, управляемых микроконтроллером. AD7195 – 24-разрядный Σ-Δ АЦП с низким шумом и низким дрейфом имеет в своем составе не только со встроенный усилитель с программируемым усилением (PGA), но и драйверы, необходимые для реализации переменного возбуждения датчика. АЦП выполняет синхронное возбуждение датчика и оцифровку входного сигнала, что существенно упрощает измерительную схему.
Реализация
При использовании усилителей с нулевым дрейфом и АЦП с нулевым дрейфом очень важно знать частоту прерывания каждого компонента и правильно оценивать вероятность возникновения интермодуляционных искажений (IMD, intermodulation distortion). Когда два сигнала объединяются, результирующий сигнал будет содержать исходные два сигнала, а также сумму и разность этих двух сигналов.
Например, в схеме с усилителем с нулевым дрейфом ADA4522-2 и Σ-Δ АЦП AD7177-2, частоты прерываний каждой из микросхем будут смешиваться и создавать побочные суммарные и разностные сигналы. ADA4522-2 использует частоту переключений 800 кГц, в то время как частота переключений AD7177-2 составляет 250 кГц. Смешивание этих двух частот приведет к появлению дополнительных артефактов на частотах 550 кГц и 1050 кГц. В данном случае максимальная частота среза встроенного цифрового фильтра AD7177-2 составляет 2,6 кГц, что намного ниже частоты самой низкочастотной помехи, поэтому фильтр удалит все интермодуляционные искажения. Однако если в схеме будет использоваться пара последовательно включенных одинаковых усилителей с нулевым дрейфом, то они также создадут интермодуляционные искажения на частоте, равной разнице их частот переключений. Очевидно, что эта разница частот будет очень маленькой, и, следовательно, частота интермодуляционных искажений будет близка к постоянной составляющей и может попасть в интересующую разработчика частотную область.
В любом случае, при проектировании схем, использующих микросхемы со стабилизацией прерыванием, важно учитывать интермодуляционные искажения. Следует отметить, что большинство усилителей с нулевым дрейфом используют более низкие частоты переключений, чем ADA4522-2. При проектировании прецизионных измерительных схем высокая частота переключений становится огромным преимуществом семейства ADA4522.
Заключение
1/f-шум способен ограничить эффективность любой прецизионной измерительной низкочастотной схемы. Тем не менее, этот шум может быть удален различными способами, такими как стабилизация прерыванием и переменное возбуждение. Эти методы имеют свои недостатки, с которыми удается успешно бороться в современных усилителях и Σ-Δ АЦП, в результате чего спектр приложений для компонентов с нулевым дрейфом становится все шире.
Литература
- W. H. Press. ‟Flicker Noises in Astronomy and Elsewhere.” Comments in Astrophysics, 1978. (PDF)
- F.N. Hooge. ‟1/f Noise Sources.” IEEE Transactions on Electron Devices Vol. 41, 11., 1994.
- MT-048. ‟Op Amp Noise Relationships: 1/f Noise, RMS Noise and Equivalent Noise Bandwidth.” Analog Devices, 2009. (PDF)
- Walt Jung. ‟Op Amp Applications Handbook.” Newnes, 2005.
- MT-047. ‟Op Amp Noise.”Analog Devices, 2009. (PDF)
- Kusuda Wong. ‟Zero-Drift Amplifiers: Now Easy to Use in High Precision Circuits.” Analog Dialogue Vol. 49, 2015.
- Luis Orozco. ‟Synchronous Detectors Facilitate Precision Low-Level Measurements.” Analog Dialogue Vol. 48, 2014.
- Albert OʼGrady. ‟Transducer/Sensor Excitation and Measurement Techniques.” Analog Dialogue Vol. 34, 2000.