Какой тип электродвигателя лучше всего подходит для моего проекта?
Узнайте, какие проекты лучше всего работают с коллекторными двигателями постоянного тока, бесколлекторными двигателями, серводвигателями и шаговыми двигателями.
Если вы разрабатываете проекты с движущимися частями, скорее всего, вам понадобится электродвигатель. Но существует несколько различных типов электродвигателей, обычно доступных разработчикам.
Коллекторные двигатели постоянного тока, бесколлекторные двигатели, серводвигатели и шаговые двигатели – это четыре наиболее распространенных типа электродвигателей, которые можно найти практически в любом проекте, в котором есть движение. Использование каждого из этих типов двигателей в вашем проекте имеет свой набор преимуществ и потенциальных проблем.
В данной статье рассматриваются типы проектов, для которых хорошо подходит тот или иной тип двигателя, и приводятся базовые рейтинги стоимости, крутящего момента, максимальной скорости и точности позиционирования по шкале от 0 до 5.
Коллекторный двигатель постоянного тока
Коллекторные двигатели постоянного тока являются самыми дешевыми, простыми и легкими в управлении из всех технологий двигателей, обсуждаемых в данной статье. Они идеально подходят для проектов с ограниченным бюджетом, которые не требую какого-либо точного управления позиционированием, и для которых отношение мощность/масса не очень важно.

Коллекторные двигатели постоянного тока также полезны для проектов, требующих чрезвычайно простого управления. Эти типы двигателей могут управляться не более чем замыканием/размыканием ключа. Управление их скоростью – это просто регулировка напряжения, подаваемого на двигатель или изменение коэффициента заполнения (или скважности) ШИМ сигнала, если задействован микроконтроллер.
Лучшие типы проектов для коллекторных двигателей постоянного тока
Наборы для создания роботов для начинающих
Наборы для создания роботов для начинающих почти повсеместно используют коллекторные двигатели постоянного тока из-за их низкой стоимости и потому, что для их работы не требуются современные микроконтроллеры или сложное программирование.
Используя два двигателя с двумя колесами на каждой стороне шасси робота, мы можете создать достаточно сложного робота. Многие из базовых наборов робототехники такого типа доступны в магазинах.
Конструкции, использующие вибромоторы
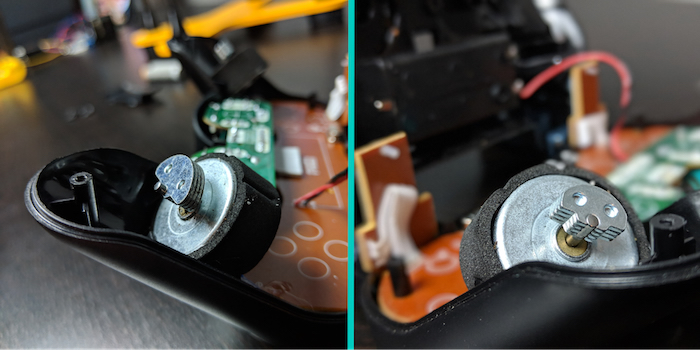
Вибромоторы состоят из коллекторного двигателя постоянного тока с грузом, прикрепленным асимметрично к валу двигателя. Вы можете использовать вибромоторы в самодельных контроллерах и в любых других проектах, требующих доставки пользователю неслышимых уведомлений (например, как ваш телефон в режиме вибрации).
Из-за простоты управления коллекторными двигателями постоянного тока интенсивность вибрации можно модулировать, просто регулируя напряжение, подаваемое на двигатель.
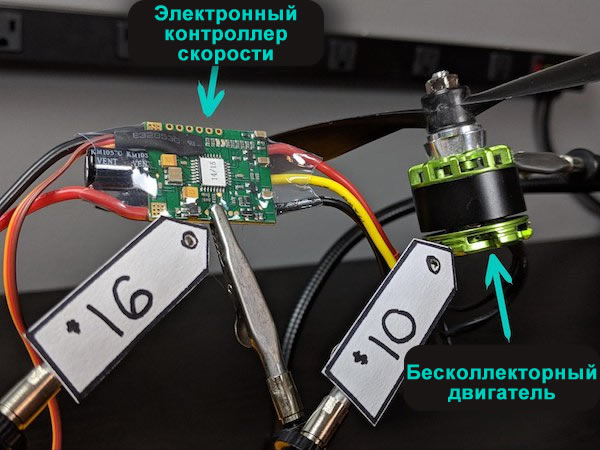
Бесколлекторные двигатели
Несмотря на то, что бесколлекторные двигатели начинают заменять коллекторные двигатели постоянного тока в профессиональных устройствах и электромобилях, они также приобретают популярность в самодельных проектах благодаря наличию мощных, но доступных по цене микроконтроллеров.


Бесколлекторные двигатели обеспечивают большую надежность, более высокие максимальные скорости и более высокую эффективность по сравнению с коллекторными двигателями постоянного тока. Однако они дороже, чем коллекторные двигатели постоянного тока, особенно с учетом того, что им требуются специализированные контроллеры скорости для взаимодействия с микроконтроллерами, что иногда может быть дороже, чем сам двигатель.
Лучшие типы проектов для бесколлекторных двигателей
Любительские проекты летательных аппаратов
Бесколлекторные двигатели чрезвычайно полезны в любительских проектах летательных аппаратов, включая квадрокоптеры, вертолеты и самолеты.
Более высокая эффективность бесколлекторных двигателей, по сравнению с коллекторными двигателями постоянного тока, имеет два основных последствия для проектов радиоуправляемых летательных аппаратов:
- Бесколлекторные двигатели потребляют меньше энергии для выработки той же мощности, что и коллекторный двигатель постоянного тока примерно такого же размера, что означает, что разработчики получают больше энергии от того же аккумулятора.
- Бесколлекторные двигатели имеют боле высокую выходную мощность при том же размере двигателя. В частности, для летательных аппаратов отношение мощности к весу является критически важной характеристикой, и бесколлекторные двигатели полезны для увеличения этого отношения.

Радиоуправляемые машины
Радиоуправляемые машины, особенно те, которые используются для гонок, также выигрывают от технологий бесколлекторных двигателей. Более высокое отношение мощности к весу полезно в радиоуправляемых машинах по той же причине, что и для летательных аппаратов, для повышения производительности.
Для радиоуправляемых машин бесколлекторные двигатели обеспечивают большие крутящий момент и максимальные скорости, чем бензиновые двигатели. Кроме того, бесколлекторные двигатели в радиоуправляемых машинах обеспечивают пиковый крутящий момент почти мгновенно при подаче питания. Бензиновые двигатели, напротив, должны развивать более высокие скорости, чтобы максимизировать крутящий момент.
Стабилизатор камеры
Если вы записываете видео своего проекта, очень полезным инструментом для повышения профессионализма ваших видео за счет уменьшения тряски может стать стабилизатор камеры.
Стабилизатор камеры – это устройство, которое поддерживает камеру неподвижно, обеспечивая более плавные кадры. Стабилизаторы выполняют это, компенсируя движение, используя три бесколлекторных двигателя, по одному на каждую ось движения.

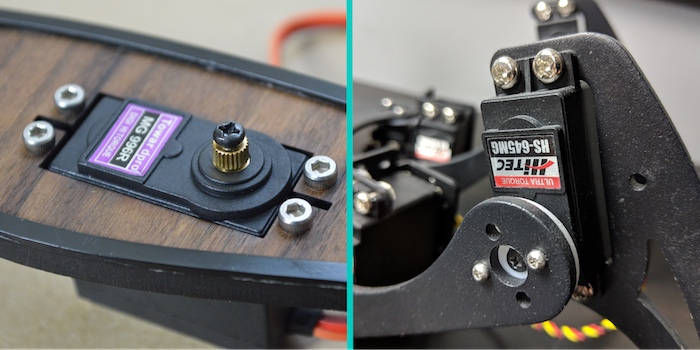
Серводвигатели
В то время как коллекторные двигатели постоянного тока и бесколлекторные двигатели разработаны для регулируемой скорости, серводвигатели разработаны для точного позиционирования.

Серводвигатели оснащены встроенным аппаратным обеспечением для определения положения, что позволяет контроллеру серводвигателя измерять точное угловое положение вала двигателя, также называемое углом поворота. Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
Лучшие типы проектов для серводвигателей
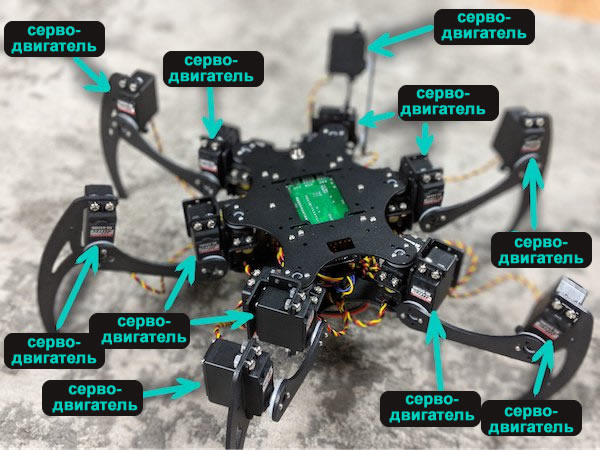
Шагающий робот
Если вы создаете шагающего робота, имеет ли он две, четыре, шесть или даже большее количество ног, серводвигатели почти наверняка будут выполнять основную работу в вашем проекте.

В шагающих роботах серводвигатели выступают в качестве суставов (и немного похожи на мышцы, но анатомическая аналогия здесь немного нарушается). Компьютер, на котором работает ваш робот, будет использовать обратную кинематику для вычисления угла, который должен принимать каждый сустав, чтобы выставить робота в определенном положении. Серводвигатели позволяют контроллеру точно управлять углом каждого сустава робота.
Роботизированные руки
Серводвигатели также полезны для создания роботизированных рук (роботов-манипуляторов). Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.

Серводвигатели также обеспечивают высокий крутящий момент на низких скоростях, благодаря редуктору между двигателем и выходным валом, что позволяет роботам-манипуляторам поднимать тяжелые предметы.
Наконец, сервопривод будет сопротивляться внешним силам, пытающимся изменить положение манипулятора. Например, если вы соберете роботизированную руку и заставите ее пройти дальше точки, которую ищет микроконтроллер, то, как только вы перестанете прикладывать усилие к манипулятору, серводвигатели вернутся в исходное положение.
Шаговые двигатели (описанные в следующем разделе), напротив, не имеют механизма для определения того, изменяют ли их положение внешние силы.
Рулевое управление для радиоуправляемых машин
В радиоуправляемых машинах серводвигатели обычно используются для рулевых механизмов. Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Шаговые двигатели
Шаговые двигатели, как и серводвигатели, предназначены для построения машин, требующих точных управления и отслеживания позиционирования.

То, как шаговые двигатели позволяют управлять позиционированием, сильно отличается от способа, используемого сервоприводами. Серводвигатели имеют возможности абсолютного позиционирования. В любой момент микроконтроллер может сделать запрос контроллеру сервопривода и получить назад значение угла.
Шаговый двигатель, напротив, использует относительное позиционирование. Шаговые двигатели вращаются не непрерывно (как коллекторные двигатели постоянного тока или бесколлекторные двигатели), а дискретными «шагами»,
Типовой шаговый двигатель имеет 200 шагов на полный оборот. Таким образом, каждый раз, когда шаговый двигатель «делает шаг», он поворачивается на 1,8°. Тщательно отслеживая количество шагов, на которое шаговый двигатель повернулся из известного начального положения, микроконтроллер может с высокой степенью точности определять положение двигателя или всего, что к нему прикреплено.
Лучшие типы проектов для шаговых двигателей
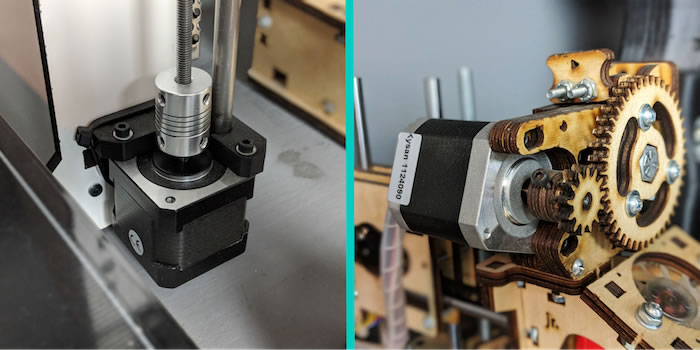
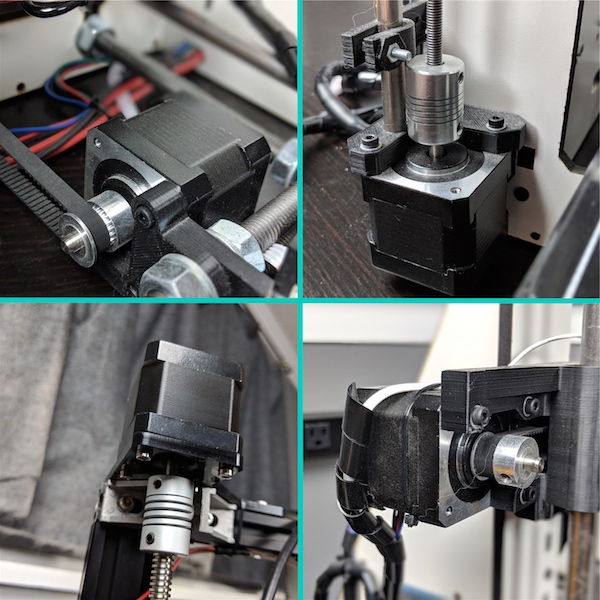
3D принтеры
Шаговые двигатели используются практически во всех настольных 3D принтерах. Эта технология двигателей позволяет контроллерам 3D принтеров отслеживать положение печатающей головки с точностью до минуты (обычно в масштабе микрометров). Кроме того, шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях, что полезно для перемещения тяжелого экструдера вокруг рабочей области.
Станки ЧПУ
По причинам, аналогичным 3D принтерам, шаговые двигатели широко используются в станках ЧПУ. Станок с ЧПУ запускает задание с известной нулевой позиции. Контроллер подсчитывает количество шагов, на которое перемещаются двигатели, переводя их в расстояния в соответствие с конструкцией ремней, которыми управляют шаговые двигатели. Этот тип отслеживания положения обеспечивает высокий уровень точности размеров обрабатываемых станком ЧПУ деталей.
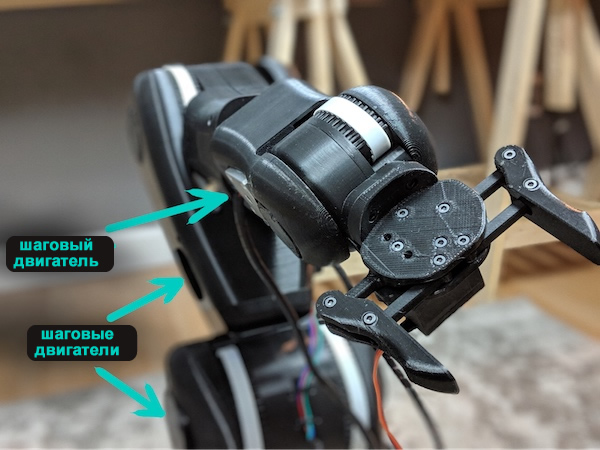
Большие роботы-манипуляторы
В предыдущем разделе объяснялось, как в более мелких роботах манипуляторах используются серводвигатели. В более крупных роботах манипуляторах часто используются шаговые двигатели. Таким образом, если вы разрабатываете робота-манипулятора, который должен будет перемещать тяжелые грузы, дополнительный крутящий момент больших шаговых двигателей по сравнению с крутящим моментом, обеспечиваемым серводвигателями, позволит вашему роботу-манипулятору поднимать и перемещать гораздо более тяжелые объекты.