Шина I2C. Подробности аппаратной реализации
Основная информация для понимания и проектирования аппаратного обеспечения, необходимого для шины I2C.
Дополнительная информация
Иногда небольшое усложнение – это хорошо
Протокол I2C отличается некоторыми непростыми особенностями: вы не просто соединяете выводы нескольких микросхем вместе, а затем позволяете низкоуровневым аппаратным средствам брать управление на себя, пока вы читаете или записываете в соответствующий буфер, как это примерно происходит в случаях с SPI (последовательным периферийным интерфейсом) и UART (универсальным асинхронным приемником/передатчиком). Но сложность I2C небезосновательна; остальная часть данной статьи поможет вам понять несколько нюансов аппаратной реализации, которые делают I2C настолько универсальным и надежным вариантом для последовательной связи между несколькими независимыми микросхемами.
Открытый сток
Определяющей особенностью I2C является то, что каждое устройство на шине, должно подключаться к линиям тактового сигнала (сокращенно SCL) и сигнала данных (сокращенно SDA) через выходные драйверы с открытым стоком (или открытым коллектором). Давайте посмотрим, что это на самом деле означает. Сначала рассмотрим типовой CMOS (инвертирующий) выходной каскад:
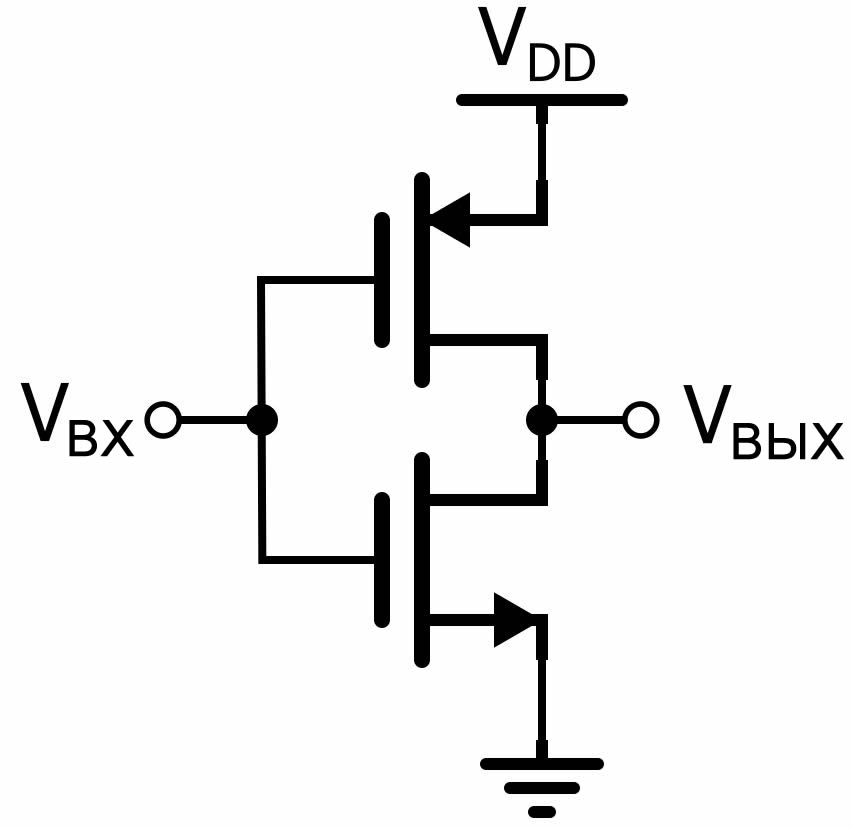
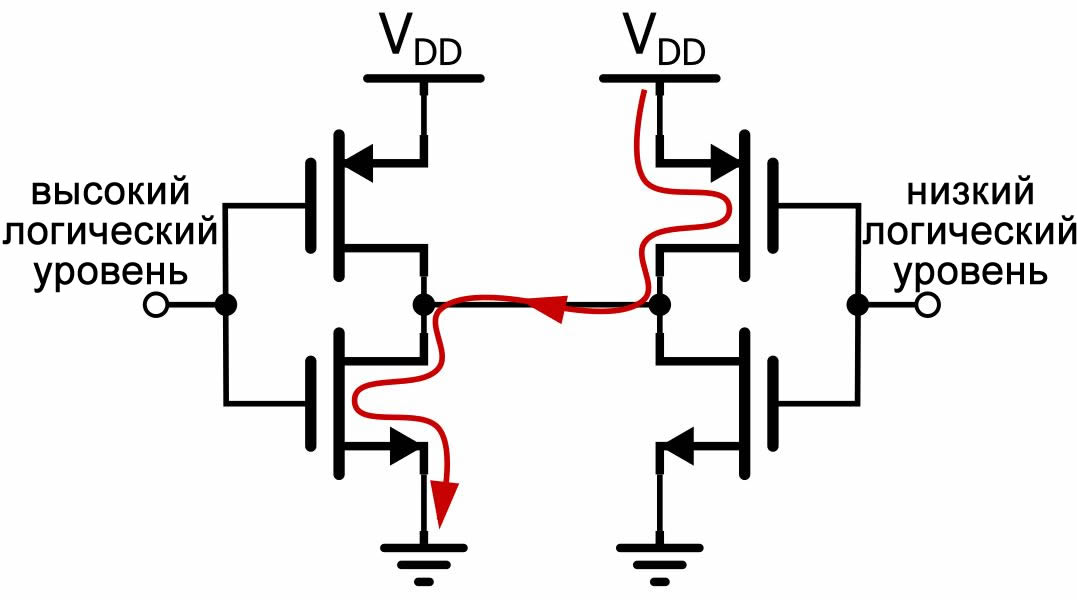
Если на входе присутствует высокий логический уровень, NMOS транзистор открыт, а PMOS транзистор закрыт. Таким образом, выход имеет низкоомное соединение с землей. Если на входе присутствует низкий логический уровень, ситуация меняется на противоположную, а выход имеет низкоомное соединение с VDD. Это называется двухтактным выходным каскадом, хотя это название не особенно информативно, поскольку оно не подчеркивает низкое сопротивление соединений, которые управляют выходом. В общем случае вы не можете напрямую соединять два двухтактных выхода, поскольку ток будет свободно протекать от VDD до земли, если на одном выходе выдается логическая единица, а на другом – логический ноль.
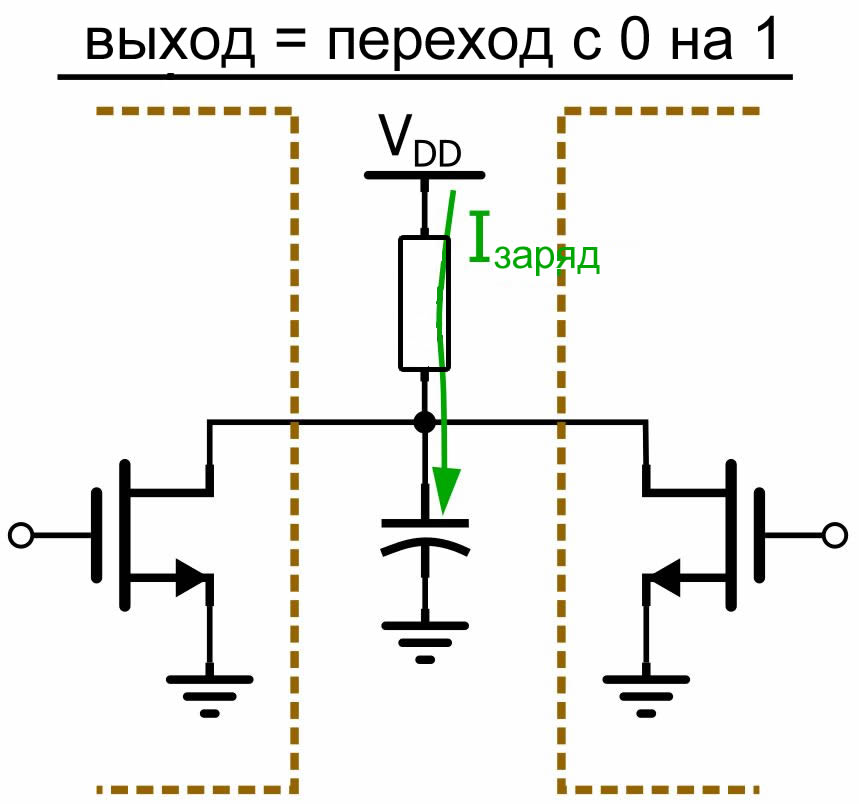
Теперь рассмотрим схему с открытым стоком:
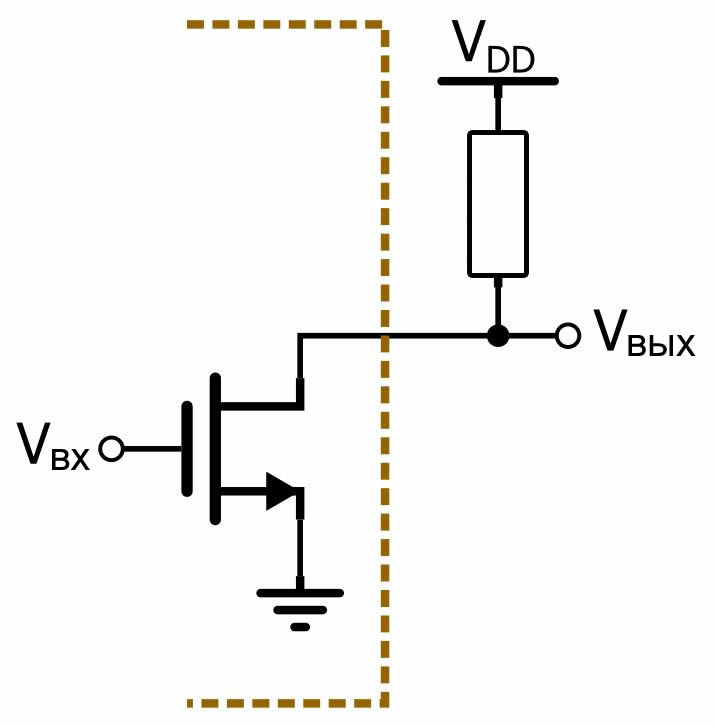
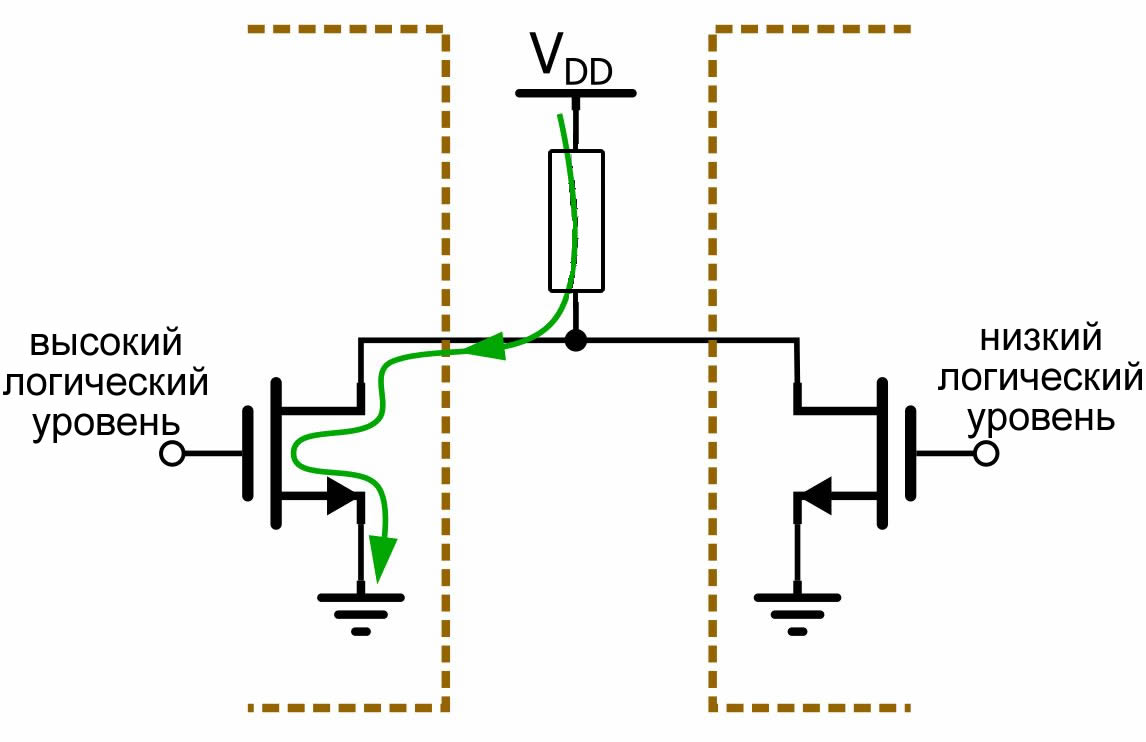
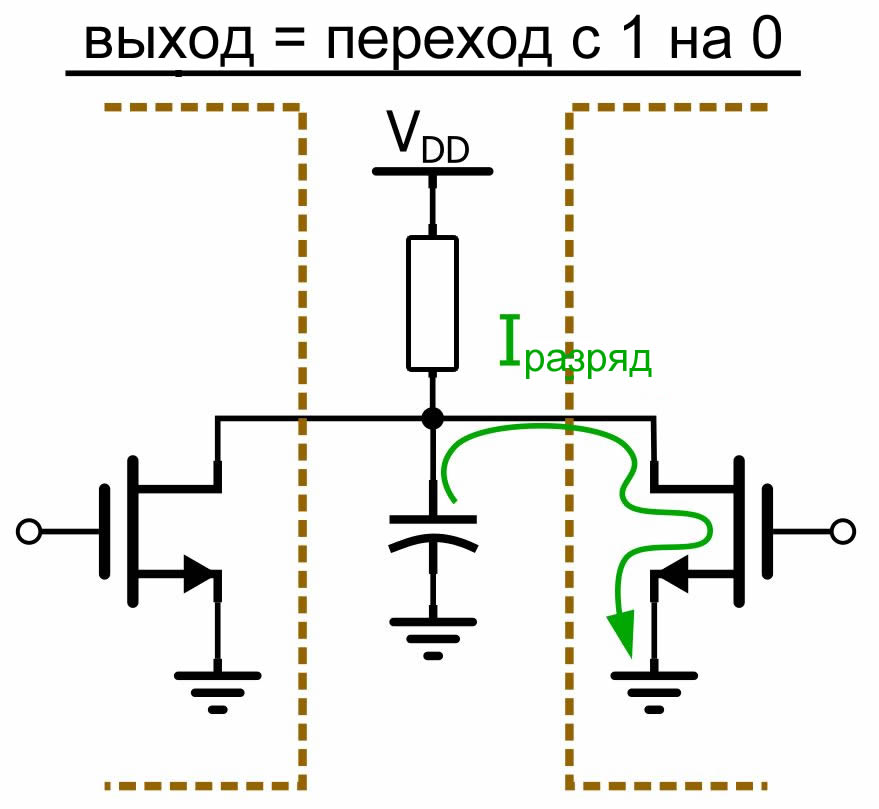
PMOS транзистор был заменен резистором, внешним по отношению к микросхеме. Если на входе присутствует высокий логический уровень, NMOS транзистор обеспечивает низкоомное соединение с землей. Но если на вход подается низкий логический уровень, NMOS транзистор выглядит как разомкнутая цепь, а это означает, что выход подтягивается к VDD через внешний резистор. Такой механизм приводит к двум важным отличиям. Во-первых, появляется неочевидное рассеивание мощности, когда на выходе низкий логический уровень, поскольку ток протекает через резистор, через канал NMOS транзистора на землю (в двухтактной схеме этот ток блокируется высоким сопротивлением закрытого PMOS транзистора). Во-вторых, выходной сигнал ведет себя по-другому, когда на выходе высокий логический уровень, так как выход подключен к VDD через гораздо более высокое сопротивление (обычно не менее 1 кОм). Эта особенность позволяет напрямую соединять два (и более) устройства с открытым стоком: даже если на одном из них низкий логический уровень, а на другом – высокий логический уровень, то подтягивающий резистор гарантирует, что ток не протекает свободно от VDD на землю.
Некоторые последствия использования на шине схемы с открытым стоком:
- Сигналы всегда по умолчанию находятся в состоянии логической единицы. Напримем, если ведущее устройство I2C пытается связаться с ведомым устройством, которое вдруг перестало функционировать, сигнал данных никогда не войдет в неопределенное состояние. Если ведомое устройство не управляет сигналом, то он будет считан как логическая единица. Аналогично, если ведущее устройство выключается в середине передачи, линии SCL и SDA вернутся в состояние логической единицы. Другие устройства могут определить, что шина доступна для новых передач, наблюдая, что и SCL, и SDA находятся в состоянии логической единицы в течении определенного периода времени.
- Любое устройство на шине может безопасно приводить сигналы в состояние логического нуля, даже если другое устройство пытается привести их в состояние логической единицы. Это является основой функции «тактовой синхронизации» или «растяжки тактового сигнала» на шине I2C: ведущее устройство генерирует последовательность тактовых импульсов, но при необходимости ведомое устройство может удерживать линию SCL на низком уровне и тем самым уменьшать тактовую частоту.
- Устройства с различными напряжениями питания могут сосуществовать на одной и той же шине, пока устройства с более низким напряжением не будут повреждены более высоким напряжением. Например, устройство 3,3 В может связываться с устройством 5 В, если SCL и SDA подтянуты до 5 В – схема с открытым стоком приводит к тому, что высокий логический уровень достигает напряжения 5 В, хотя устройство 3,3 В с типовым двухтактным каскадом не может управлять линией 5 В.
Если у вас есть R, то у вас есть RC
Выходной каскад с открытым стоком ни в коем случае не является стандартной схемой среди цифровых микросхем, и для этого есть причина: он обладает некоторыми существенными недостатками. Один из этих недостатков становится очевидным, когда мы напоминаем, что емкость есть везде. Изменение напряжения ограничено временем, необходимым для заряда или разряда емкости, связанной с определенным узлом. Проблема в том, что подтягивающие резисторы на линиях SCL и SDA ограничивают ток заряда; другими словами, мы имеем гораздо большее сопротивление в RC цепи, постоянная времени которой регулирует переход напряжения от логического низкого уровня в логическому высокому уровню.
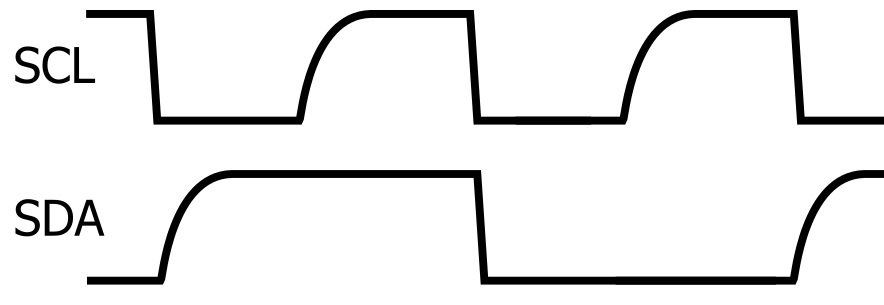
Как показывают эти диаграммы, переход от низкого уровня к высокому будет происходить значительно медленнее, чем переход от высокого уровня к низкому, что приводит к классической «пилообразной» форме сигналов I2C:
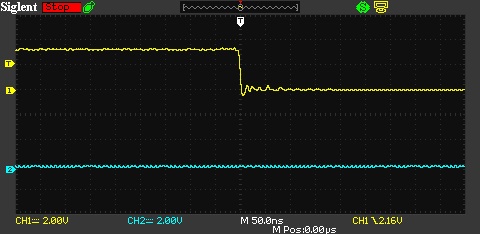
Эти две осциллограммы показывают переход от низкого уровня к высокому и от высокого уровня к низкому для тактового сигнала шины I2C с подтягивающим резистором 1 кОм и минимальной емкостью (только два устройства на шине с короткими дорожками на печатной плате).
Как выбрать номинал подтягивающих резисторов
На этом этапе должно быть очевидно, что подтягивающее сопротивление накладывает ограничения на максимальную тактовую частоту конкретной шины I2C. На самом деле здесь оказывают влияние и сопротивление, и емкость, хотя емкость от нас мало зависит, потому что она определяется, главным образом, тем, сколько устройств подключено к шине, и характером соединений между этими устройствами. Это приводит к важному вопросу: «Какой выбрать номинал для подтягивающего резистора?». Компромисс между скоростью и рассеиваемой мощностью: более низкое сопротивление уменьшает постоянную времени RC цепи, но увеличивает величину тока, протекающего от VDD на землю (через подтягивающий резистор), когда на SCL или SDA выставлен низкий логический уровень.
Официальная спецификация I2C (стр. 9) гласит, что напряжение не считается «логическим высоким уровнем», пока не достигнет 70% от VDD. Вы можете вспомнить, что постоянная времени RC цепи говорит нам, сколько времени потребуется, чтобы напряжение достигло примерно 63% от конечного напряжения. Таким образом, для простоты будем считать, что R×C говорит нам, сколько времени потребуется, чтобы уровень сигнала вырос от напряжения, близкого к потенциалу земли, до уровня логической единицы.
Теперь, как найти емкость? «Простой» способ – это сборка всей системы и измерение емкости; по крайней мере, это, вероятно, проще, чем пытаться выполнить точный расчет, который учитывает каждый источник емкости – как отмечает рекомендация от Texas Instruments, «при обычном построении электрических схем формируется невообразимое количество конденсаторов». Если подход с измерением не подходит (как это часто бывает), вы можете выполнить приблизительную оценку, определив емкость вывода для каждого устройства на шине (здесь вам поможет техническое описание), а затем добавить 3 пФ на дюйм дорожки на печатной плате и 30 пФ на фут коаксиального кабеля (эти цифры взяты из той же рекомендации, стр. 3).
Предположим, что у нас емкость шины составляет 50 пФ, и мы хотим соответствовать спецификации «стандартного режима» I2C, в которой указано, что максимальное время нарастания составляет 1000 нс.
\[t_{нарастания}=1000\ нс=\left(R\right)\left(50\ пФ\right)\ \ \Rightarrow\ \ R=20\ кОм\]
Таким образом, можно соответствовать требованиям спецификации с Rподтягивающий = 20 кОм: это значение также дает минимальное энергопотребление. Как насчет скорости? Предположим, вы хотите, чтобы длительность присутствия высокого логического уровня на линии синхронизации было, по крайней мере, в три раза больше времени нарастания.
\[t_{лог.1}=3t_{нараст}=3000\ нс\ \ \Rightarrow\ \ f_{max}=\frac{1}{2t_{лог.1}}=167\ кГц\]
Если 167 кГц не достаточно много, вы можете снизить сопротивление (за счет увеличения энергопотребления), пока не достигните желаемой тактовой частоты. (Фактически, «стандартный режим» ограничивает тактовую частоту до 100 кГц, но вы можете адаптировать эти спецификации под потребности вашей системы.)
Это грубые расчеты, но, честно говоря, вам не нужно беспокоиться о том, чтобы найти идеальное сопротивление. Этот общий подход может помочь вам поставить резистор разумного номинала, и вы всегда можете поменять резисторы, если что-то работает не так, как вы хотите.
Заключение
Если эта статья выполняет свою цель, то вы теперь хорошо знакомы с основными деталями, связанными с разработкой аппаратного обеспечения I2C. А реализацию программного обеспечения мы рассмотрим в отдельной статье.